Klasifikasi Penguat Audio
(bagian ketiga dari 3 tulisan)
oleh : aswan hamonangan
PA kelas C
Kalau penguat kelas B perlu 2 transistor untuk bekerja dengan baik, maka ada penguat yang disebut kelas C yang hanya perlu 1 transistor. Ada beberapa aplikasi yang memang hanya memerlukan 1 phase positif saja. Contohnya adalah pendeteksi dan penguat frekuensi pilot, rangkaian penguat tuner RF dan sebagainya. Transistor penguat kelas C bekerja aktif hanya pada phase positif saja, bahkan jika perlu cukup sempit hanya pada puncak-puncaknya saja dikuatkan. Sisa sinyalnya bisa direplika oleh rangkaian resonansi L dan C. Tipikal dari rangkaian penguat kelas C adalah seperti pada rangkaian berikut ini.
gambar 10 : rangkaian dasar penguat kelas C
Rangkaian ini juga tidak perlu dibuatkan bias, karena transistor memang sengaja dibuat bekerja pada daerah saturasi. Rangkaian L C pada rangkaian tersebut akan ber-resonansi dan ikut berperan penting dalam me-replika kembali sinyal input menjadi sinyal output dengan frekuensi yang sama. Rangkaian ini jika diberi umpanbalik dapat menjadi rangkaian osilator RF yang sering digunakan pada pemancar. Penguat kelas C memiliki efisiensi yang tinggi bahkan sampai 100%, namun tingkat fidelitasnya memang lebih rendah. Tetapi sebenarnya fidelitas yang tinggi bukan menjadi tujuan dari penguat jenis ini.
PA kelas D
Penguat kelas D menggunakan teknik PWM (pulse width modulation), dimana lebar dari pulsa ini proporsioal terhadap amplituda sinyal input. Pada tingkat akhir, sinyal PWM men-drive transistor switching ON dan OFF sesuai dengan lebar pulsanya. Transistor switching yang digunakan biasanya adalah transistor jenis FET. Konsep penguat kelas D ditunjukkan pada gambar-11. Teknik sampling pada sistem penguat kelas D memerlukan sebuah generator gelombang segitiga dan komparator untuk menghasilkan sinyal PWM yang proporsional terhadap amplituda sinyal input. Pola sinyal PWM hasil dari teknik sampling ini seperti digambarkan pada gambar-12. Paling akhir diperlukan filter untuk meningkatkan fidelitas.
gambar 11 : konsep penguat kelas D
gambar 12 : ilustrasi modulasi PWM penguat kelas D
Beberapa produsen pembuat PA meng-klaim penguat kelas D produksinya sebagai penguat digital. Secara kebetulan notasi D dapat diartikan menjadi Digital. Sebenarnya bukanlah persis demikian, sebab proses digital mestinya mengandung proses manipulasi sederetan bit-bit yang pada akhirnya ada proses konversi digital ke analog (DAC) atau ke PWM. Kalaupun mau disebut digital, penguat kelas D adalah penguat digital 1 bit (on atau off saja).
PA kelas E
Penguat kelas E pertama kali dipublikasikan oleh pasangan ayah dan anak Nathan D dan Alan D Sokal tahun 1972. Dengan struktur yang mirip seperti penguat kelas C, penguat kelas E memerlukan rangkaian resonansi L/C dengan transistor yang hanya bekerja kurang dari setengah duty cycle. Bedanya, transistor kelas C bekerja di daerah aktif (linier). Sedangkan pada penguat kelas E, transistor bekerja sebagai switching transistor seperti pada penguat kelas D. Biasanya transistor yang digunakan adalah transistor jenis FET. Karena menggunakan transistor jenis FET (MOSFET/CMOS), penguat ini menjadi efisien dan cocok untuk aplikasi yang memerlukan drive arus yang besar namun dengan arus input yang sangat kecil. Bahkan dengan level arus dan tegangan logik pun sudah bisa membuat transitor switching tersebut bekerja. Karena dikenal efisien dan dapat dibuat dalam satu chip IC serta dengan disipasi panas yang relatif kecil, penguat kelas E banyak diaplikasikan pada peralatan transmisi mobile semisal telepon genggam. Di sini antena adalah bagian dari rangkaian resonansinya.
PA kelas T
Penguat kelas T bisa jadi disebut sebagai penguat digital. Tripath Technology membuat desain digital amplifier dengan metode yang mereka namakan Digital Power Processing (DPP). Mungkin terinspirasi dari PA kelas D, rangkaian akhirnya menggunakan konsep modulasi PWM dengan switching transistor serta filter. Pada penguat kelas D, proses dibelakangnnya adalah proses analog. Sedangkan pada penguat kelas T, proses sebelumnya adalah manipulasi bit-bit digital. Di dalamnya ada audio prosesor dengan proses umpanbalik yang juga digital untuk koreksi timing delay dan phase.
PA kelas G
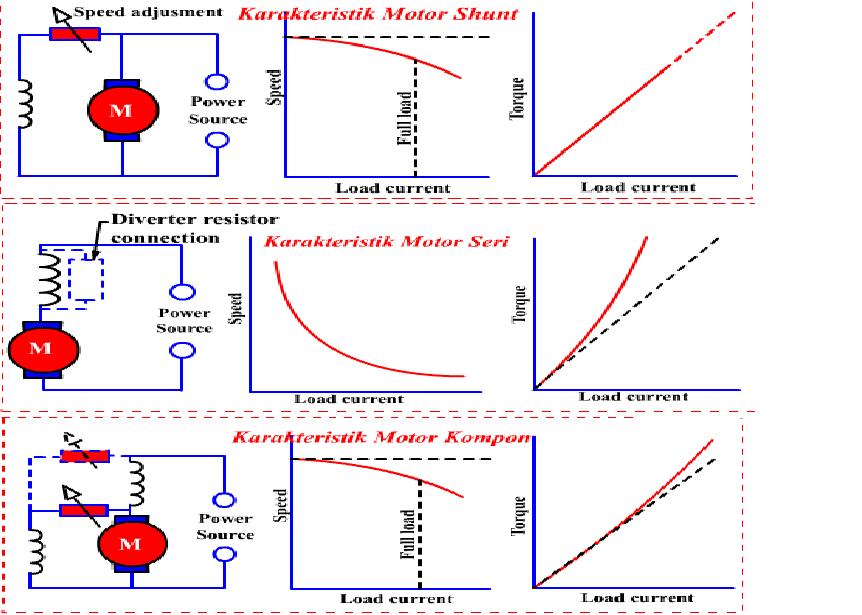
Kelas G tergolong penguat analog yang tujuannya untuk memperbaiki efesiensi dari penguat kelas B/AB. Pada kelas B/AB, tegangan supply hanya ada satu pasang yang sering dinotasikan sebagai +VCC dan –VEE misalnya +12V dan –12V (atau ditulis dengan +/-12volt). Pada penguat kelas G, tegangan supply-nya dibuat bertingkat. Terutama untuk aplikasi yang membutuhkan power dengan tegangan yang tinggi, agar efisien tegangan supplynya ada 2 atau 3 pasang yang berbeda. Misalnya ada tegangan supply +/-70 volt, +/-50 volt dan +/-20 volt. Konsep ranagkaian PA kelas G seperti pada gambar-13. Sebagai contoh, untuk alunan suara yang lembut dan rendah, yang aktif adalah pasangan tegangan supply +/-20 volt. Kemudian jika diperlukan untuk men-drive suara yang keras, tegangan supply dapat di-switch ke pasangan tegangan supply maksimum +/-70 volt.
PENGENDALI SUHU KAWAT PEMANAS DENGAN TAMPILAN M1632 LCD OLEH MODUL DST-52 DENGAN MENGGUNAKAN TEKNIK PWM
Pada edisi sebelumnya pernah dibahas mengenai Thermometer Digital yang mendeteksi suhu melalui sensor panas LM35 dengan tampilan M1632 LCD maka pada artikel ini adalah merupakan pengembangan dari artikel thermometer digital, di mana system tidak hanya mendeteksi suhu saja melainkan juga menjaga agar suhu bertahan pada nilai tertentu yang diberikan melalui Keypad KP-43865 dengan menggunakan teknik PWM (Pulse Width Modulation). Teknik ini diberikan dengan mengatur lebar pulsa yang diberikan pada rangkaian pemanas dalam periode tertentu.
Gambar 1
Blok Diagram Sistem Pengendali Suhu
Untuk mempertahankan suhu pada suatu nilai tertentu digunakan bagian pemanas (heater). Pemanas ini dibentuk dengan menggunakan kawat nikelin atau kawat dari elemen pemanas setrika yang ditrigger oleh rangkaian transistor seperti pada gambar 2. Transistor 2N3055 yang mempunyai arus maksimum hingga 5A. Dengan arus sebesar 5A dan tegangan kerja 12 Volt, kawat pemanas yang terhubung adalah kawat dengan tahanan minimal 12/5 atau 2,4 ohm.
Transistor 2N3055 mempunyai HFE atau factor penguatan sebesar 20 kali, sehingga arus yang mengalir pada basis transistor ini adalah sebesar:
= 0,25A
AT8951 yang mempunyai arus maksimum sekitar 10mA pada I/Onya tentu saja tidak mampu untuk mengendalikan transistor ini secara langsung, oleh karena itu transistor C9014 dalam hal ini diperlukan untuk memperkuat arus keluaran AT8951.
= 0,00625 atau 6,25 mA
Arus basis transistor 2N3055 adalah merupakan arus kolektor dari transistor C9014 oleh karena itu, pada formula di atas maka ditemukan arus basis yang diperlukan untuk mengendalikan transistor C9014 adalah sebesar 6,25 mA yang dapat dihasilkan oleh keluaran AT8951
Gambar 2
Rangkaian pengendali panas
Gambar 3
Antar muka M1632 LCD dengan Modul DST-52
Tampilan dalam sistem ini menggunakan M1632 LCD dengan teknik antar muka 4 bit seperti yang telah dijelaskan pada edisi sebelumnya dan tampak pada gambar 3. Sedangkan pengambilan data suhu dilakukan dengan menggunakan antar muka ADC (gambar 4) dengan proses yang telah dijelaskan pada edisi yang membahas Thermometer Digital.
Gambar 4
Antar Muka Modul AD-0809
Gambar 5
Antar Muka KP-43865
Keypad 4×3 dalam hal ini merupakan media input ke sistem yang dibahas pada artikel ini berfungsi untuk memberikan nilai setpoint temperatur. Keypad ini terhubung pada port 1 dari Modul DST-52
Gambar 6
Diagram Alir Program Utama
Proses jalannya program diawali dengan inisialisasi LCD dan dilanjutkan dengan pengaturan set point. Setpoint diatur dengan memberikan nilai suhu yang diinginkan melalui keypad. Pada bagian ini, nilai tersebut selain dikirim ke mikrokontroler dan tersimpan pada variable setpoint juga dikirim ke M1632 LCD sehingga tampak pada layar LCD.
Setelah nilai setpoint terisi, program akan mengaktifkan pemanas dengan memberikan pulsa-pulsa yang mentrigger rangkaian transistor pada pemanas. Pulsa-pulsa tersebut akan memberikan panas berdasarkan lebar dari pulsa PWMTime (gambar 7). Lebar pulsa ini tersimpan pada variable PWMTime dari program yang ada pada Modul DST-52. Semakin lebar pulsa PWMTime maka panas yang dihasilkan oleh kawat pemanaspun akan semakin besar. Tampak sinyal yang ada pada bagian bawah dari gambar 7 mempunyai PWMTime yang lebih lebar daripada bagian atasnya. Hal ini menunjukkan bahwa panas yang dibangkitkan oleh kawat pemanas dengan sinyal yang ada di bagian bawah lebih panas daripada sinyal yang bagian atas.
Gambar 7
Pulsa PWM
Hal ini disebabkan karena rangkaian pengendali panas pada gambar 2 bersifat aktif logika 0, oleh karena itu dengan adanya logika 0 yang semakin lebar dalam satu periode waktu tertentu maka panas yang dihasilkanpun akan semakin tinggi.
Pada mulanya pemanas diaktifkan dengan pulsa PWMTime paling kecil dan kemudian system akan membaca suhu yang terjadi melalui ADC. Data dari ADC yang berupa besaran tegangan dikonversi menjadi suhu dengan system pentabelan (Lihat table konversi pada artikel Thermometer Digital). Besaran suhu yang diperoleh juga ditampilkan ke layar LCD.
Bagian delay berfungsi untuk menunda kerja program beberapa saat untuk menunggu respon perubahan suhu dengan adanya perubahan PWMTime. Lama delay sangat tergantung pada beberapa factor. Di antaranya adalah, bahan dari kawat pemanas dan kecepatan perubahan yang diinginkan.
Pada bagian pengatur suhu sesuai setpoint, nilai suhu yang terbaca oleh ADC akan dibandingkan dengan nilai setpoint, (bagian ini dijelaskan lebih detail pada gambar ![]() apabila nilai suhu belum mencapai setpoint, maka PWMTime akan terus bertambah hingga diperoleh nilai yang sama dengan setpoint. Apabila nilai suhu melebihi setpoint maka PWMTime akan berkurang hingga diperoleh pula nilai yang sama dengan setpoint.
apabila nilai suhu belum mencapai setpoint, maka PWMTime akan terus bertambah hingga diperoleh nilai yang sama dengan setpoint. Apabila nilai suhu melebihi setpoint maka PWMTime akan berkurang hingga diperoleh pula nilai yang sama dengan setpoint.
Pada saat suhu sesuai dengan setpoint dengan toleransi yang disebutkan pada bagian konstantan Toleransi, maka pesan ‘Tercapai’ akan ditampilkan pada baris 1 M1632 LCD.
Program lengkap aplikasi ini dapat anda download di www.delta-electronic.com bagian software dengan nama KontrolSuhu.zip
Gambar 8
Diagram alir Bagian Pengaturan Suhu
gambar 13 : konsep penguat kelas G dengan tegangan supply yang bertingkat
PA kelas H
Konsep penguat kelas H sama dengan penguat kelas G dengan tegangan supply yang dapat berubah sesuai kebutuhan. Hanya saja pada penguat kelas H, tinggi rendahnya tegangan supply di-desain agar lebih linier tidak terbatas hanya ada 2 atau 3 tahap saja. Tegangan supply mengikuti tegangan output dan lebih tinggi hanya beberapa volt. Penguat kelas H ini cukup kompleks, namun akan menjadi sangat efisien.
Penutup
High fidelity dan high efficiency adalah dua hal yang menjadi tujuan pokok pada setiap rancangan rangkaian penguat amplifier. Ada beberapa konsep dan metoda lain dari penguat amplifier yang belum disinggung pada tulisan ini. Biasanya konsep dan metoda tersebut dinamakan menurut urutan abjad latin. Mungkin saja pada satu saat kita akan mengenal penguat kelas Z.
-end-
PULSE WIDHT MODULATION
Konsep Dasar PWM
Salah satu cara yang paling mudah untuk membangkitkan sebuah tegangnan analog dari sebuah nilai digital adalah dengan menggunakan pulse-width modulation (PWM). Dalam PWM gelombang kotak, frekuensi tinggi dibangkitkan sebagai output digital. Untuk contoh, sebuah port bit secara kontinyu melakukan kegiatan saklar on dan off pada frekuensi yang relatif tinggi. Selanjutnya, bila sinyal diumpankan pada LPF low pass filter, tegangan pada output filter akan sama dengan Root Mean Squere ( RMS ) dari sinyal gelombang kotak. Selanjutnya tegangan RMS dapat divariasi dengan mengubah duty cycle dari sinyal.
DUTY CYCLE menyatakan fraksi waktu sinyal pada keadaan logika high dalam satu siklus. Satu siklus diawali oleh transisi low to high dari sinyal dan berakhir pada transisi berikutnya. Selama satu siklus, jika waktu sinyal pada keadaan high sama dengan low maka dikatakan sinyal mempunyai DUTY CYCLE 50 %. DUTY CYCLE 20 % menyatakan sinyal berada pada logika 1 selama 1/5 dari waktu total
PWM dengan Mikrokontroler
Pada rangkaian tersebut menunjukkan sebuah DAC yang dibangun dengan metode PWM, yang digunakan untuk mengendalikan kecepatan motor DC dengan modulasi lebar pulsa. Bit 0 dari P0 mengemudikan sebut saklar transistor sebagaimana yang ditunjukkan pada gambar. Motor dihidupkan dan dimatikan untuk suatu periode tertentu
Bagian pada saat motor hidup disebut DUTY CYCLE. Pada program ini menggunakan sebuah byte untuk menyimpan lama waktu motor on, dari sejumlah 256 siklus. Bila duty cycle yang diberikan adalah 10 % maka program ini menyimpan data waktu ON selama 10 siklus dan OFF selama 246 siklus dari 256 siklus.
Berikutnya nilai duty cycle disimpan pada RAM internal yang diberi label dCycle. Komplemen dari duty cycle disimpan pada RAM internal dengan nama dCycleC. Pada perancangan software ini, Timer 0 diaplikasikan dalam mode 2, yaitu 8 bit timer auto reload, yang akan melakukan increment nilai register counter setiap siklus, dan bila terjadi overflow maka data yang berada pada TH0 akan diloadkan ke TL0 yang berfungsi sebagai counter 8 bit.
Bila frekuensi kristal yang digunakan adalah 12 Mhz, sehingga jika nilai reload adalah 0 maka timer 0 akan over flow setiap 256 udetik; dan jika nilai reload adalah FFh maka timer akan over flow setiap 1 udetik. Pertama kali program menghidupkan motor dan menempatkan nilai dCycle ke TH0 sebagai nilai reload. Setelah timer overflow, komplemen dari duty cycle dCycleC akan ditempatkan ke TH0 sebagai nilai reload dan motor berhenti berputar. Pada pemrograman ini keadaan motor dapat dilihat pada register yang dapat dialamati bit, yang ditandai sebagai motorFlag.
Pulse Width Modulation (PWM) adalah sebuah cara memanipulasi lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam suatu perioda, yang akan digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan rata-rata yang berbeda. Penggunaan PWM sangat banyak, mulai dari pemodulasian data untuk telekomunikasi, pengontrolan daya atau tegangan yang masuk ke beban, regulator tegangan, audio effect dan penguatan, serta aplikasi-aplikasi lainnya.
Terlihat pada gambar, bahwa sinyal PWM adalah sinyal digital yang amplitudonya tetap, namun lebar pulsa yang aktif (duty cycle) per periodenya dapat diubah-ubah. Dimana periodenya adalah waktu pulsa high (1) Ton ditambah waktu pulsa low (0) Toff.
Duty cycle adalah lamanya pulsa high (1) Ton dalam satu perioda. Jika f(t) adalah sinyal PWM, maka besarnya duty cyclenya adalah :
Pada grafik PWM teratas terlihat bahwa sinyal high per periodenya, sangat kecil (hanya 10%). Pada grafik PWM ditengah terlihat sinyal highnya hampir sama dengan sinyal low (50%). Dan pada gambar paling bawah terlihat bahwa sinyal high-nya lebih besar dari sinyal low-nya (90%).
Maka jika dimisalkan tegangan input yang melalui rangkaian tersebut sebesar 10 V. Maka jika digunakan PWM teratas, nilai tegangan output rata-ratanya sebesar 1 V (10% dari Vsource), jika digunakan PWM yang tengah, maka tegangan output rata-ratanya sebesar 5V (50%). Begitu pula jika menggunakan PWM yang paling bawah, maka tegangan output rata-ratanya sebesar 9V (90%).
Bagaimana cara mendapatkan sinyal PWM?
Untuk mendapatkan sinyal PWM dari input berupa sinyal analog, dapat dilakukan dengan membentuk gelombang gigi gergaji atau sinyal segitiga yang diteruskan ke komparator bersama sinyal aslinya. (Namun berbahagialah bagi para pengguna mikrokontroler, sebab pada beberapa tipe mikrokontroler telah tersedia fasilitas pembangkit PWM. Jadi tidak perlu bingung-bingung lagi)
Dimana sinyal input analog (berwarna hijau) dimodulasikan dengan sinyal gigi gergaji (berwarna biru), sehingga didapatkan sinyal PWM seperti gambar dibawahnya (berwarna merah)
Ya… segini dulu aja teorinya. Saya rasa topik ini bisa dikembangkan, terutama bagi para penggemar mikrokontroler dan robotika. Untuk mengatur kecepatan putar motor DC, membuat dimmer LED, atau pengontrolan lainnya. Intinya, bagaimana caranya mengontrol daya yang diberikan ke beban, dengan menggunakan sumber yang konstan? Jawabannya adalah PWM!
Silahkan.. yang mau menambahkan! Dengan sangat senang hati.
Pulse Width Modulation
September 21, 2007 oleh roenz
Salah satu cara untuk mengirimkan informasi analog adalah dengan menggunakan pulsa-pulsa tegangan atau pulsa-pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa-pulsa persegi yang berulang-ulang. Salah satu teknik modulasi pulsa yang digunakan adalah teknik modulasi durasi atau lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut. Metode tersebut dikenal dengan nama Pulse Width Modulation (PWM). Metode PWM dikenal juga dengan nama Pulse Duration Modulation (PDM) atau Pulse Length Modulation (PLM)
Untuk membangkitkan sinyal PWM, digunakan komparator untuk membandingkan dua buah masukan yaitu generator sinyal dan sinyal referensi. Hasil keluaran dari komparator adalah sinyal PWM yang berupa pulsa-pulsa persegi yang berulang-ulang. Durasi atau lebar pulsa dapat dimodulasi dengan cara mengubah sinyal referensi.
Metode PWM digunakan untuk mengatur kecepatan motor, informasi yang dibawa oleh pulsa-pulsa persegi merupakan tegangan rata-rata. Besarnya tegangan rata-rata tersebut dapat diperoleh dari :
Vout = (Vref * duty cycle) / periode
Semakin lebar durasi waktu tunda positif pulsa dari sinyal PWM yang dihasilkan, maka perputaran motor akan semakin cepat, demikian juga sebaliknya.
36
Klasifikasi Penguat Audio
(bagian ketiga dari 3 tulisan)
oleh : aswan hamonangan
PA kelas C
Kalau penguat kelas B perlu 2 transistor untuk bekerja dengan baik, maka ada penguat yang disebut kelas C yang hanya perlu 1 transistor. Ada beberapa aplikasi yang memang hanya memerlukan 1 phase positif saja. Contohnya adalah pendeteksi dan penguat frekuensi pilot, rangkaian penguat tuner RF dan sebagainya. Transistor penguat kelas C bekerja aktif hanya pada phase positif saja, bahkan jika perlu cukup sempit hanya pada puncak-puncaknya saja dikuatkan. Sisa sinyalnya bisa direplika oleh rangkaian resonansi L dan C. Tipikal dari rangkaian penguat kelas C adalah seperti pada rangkaian berikut ini.
gambar 10 : rangkaian dasar penguat kelas C
Rangkaian ini juga tidak perlu dibuatkan bias, karena transistor memang sengaja dibuat bekerja pada daerah saturasi. Rangkaian L C pada rangkaian tersebut akan ber-resonansi dan ikut berperan penting dalam me-replika kembali sinyal input menjadi sinyal output dengan frekuensi yang sama. Rangkaian ini jika diberi umpanbalik dapat menjadi rangkaian osilator RF yang sering digunakan pada pemancar. Penguat kelas C memiliki efisiensi yang tinggi bahkan sampai 100%, namun tingkat fidelitasnya memang lebih rendah. Tetapi sebenarnya fidelitas yang tinggi bukan menjadi tujuan dari penguat jenis ini.
PA kelas D
Penguat kelas D menggunakan teknik PWM (pulse width modulation), dimana lebar dari pulsa ini proporsioal terhadap amplituda sinyal input. Pada tingkat akhir, sinyal PWM men-drive transistor switching ON dan OFF sesuai dengan lebar pulsanya. Transistor switching yang digunakan biasanya adalah transistor jenis FET. Konsep penguat kelas D ditunjukkan pada gambar-11. Teknik sampling pada sistem penguat kelas D memerlukan sebuah generator gelombang segitiga dan komparator untuk menghasilkan sinyal PWM yang proporsional terhadap amplituda sinyal input. Pola sinyal PWM hasil dari teknik sampling ini seperti digambarkan pada gambar-12. Paling akhir diperlukan filter untuk meningkatkan fidelitas.
gambar 11 : konsep penguat kelas D
gambar 12 : ilustrasi modulasi PWM penguat kelas D
Beberapa produsen pembuat PA meng-klaim penguat kelas D produksinya sebagai penguat digital. Secara kebetulan notasi D dapat diartikan menjadi Digital. Sebenarnya bukanlah persis demikian, sebab proses digital mestinya mengandung proses manipulasi sederetan bit-bit yang pada akhirnya ada proses konversi digital ke analog (DAC) atau ke PWM. Kalaupun mau disebut digital, penguat kelas D adalah penguat digital 1 bit (on atau off saja).
PA kelas E
Penguat kelas E pertama kali dipublikasikan oleh pasangan ayah dan anak Nathan D dan Alan D Sokal tahun 1972. Dengan struktur yang mirip seperti penguat kelas C, penguat kelas E memerlukan rangkaian resonansi L/C dengan transistor yang hanya bekerja kurang dari setengah duty cycle. Bedanya, transistor kelas C bekerja di daerah aktif (linier). Sedangkan pada penguat kelas E, transistor bekerja sebagai switching transistor seperti pada penguat kelas D. Biasanya transistor yang digunakan adalah transistor jenis FET. Karena menggunakan transistor jenis FET (MOSFET/CMOS), penguat ini menjadi efisien dan cocok untuk aplikasi yang memerlukan drive arus yang besar namun dengan arus input yang sangat kecil. Bahkan dengan level arus dan tegangan logik pun sudah bisa membuat transitor switching tersebut bekerja. Karena dikenal efisien dan dapat dibuat dalam satu chip IC serta dengan disipasi panas yang relatif kecil, penguat kelas E banyak diaplikasikan pada peralatan transmisi mobile semisal telepon genggam. Di sini antena adalah bagian dari rangkaian resonansinya.
PA kelas T
Penguat kelas T bisa jadi disebut sebagai penguat digital. Tripath Technology membuat desain digital amplifier dengan metode yang mereka namakan Digital Power Processing (DPP). Mungkin terinspirasi dari PA kelas D, rangkaian akhirnya menggunakan konsep modulasi PWM dengan switching transistor serta filter. Pada penguat kelas D, proses dibelakangnnya adalah proses analog. Sedangkan pada penguat kelas T, proses sebelumnya adalah manipulasi bit-bit digital. Di dalamnya ada audio prosesor dengan proses umpanbalik yang juga digital untuk koreksi timing delay dan phase.
PA kelas G
Kelas G tergolong penguat analog yang tujuannya untuk memperbaiki efesiensi dari penguat kelas B/AB. Pada kelas B/AB, tegangan supply hanya ada satu pasang yang sering dinotasikan sebagai +VCC dan –VEE misalnya +12V dan –12V (atau ditulis dengan +/-12volt). Pada penguat kelas G, tegangan supply-nya dibuat bertingkat. Terutama untuk aplikasi yang membutuhkan power dengan tegangan yang tinggi, agar efisien tegangan supplynya ada 2 atau 3 pasang yang berbeda. Misalnya ada tegangan supply +/-70 volt, +/-50 volt dan +/-20 volt. Konsep ranagkaian PA kelas G seperti pada gambar-13. Sebagai contoh, untuk alunan suara yang lembut dan rendah, yang aktif adalah pasangan tegangan supply +/-20 volt. Kemudian jika diperlukan untuk men-drive suara yang keras, tegangan supply dapat di-switch ke pasangan tegangan supply maksimum +/-70 volt.
PENGENDALI SUHU KAWAT PEMANAS DENGAN TAMPILAN M1632 LCD OLEH MODUL DST-52 DENGAN MENGGUNAKAN TEKNIK PWM
Pada edisi sebelumnya pernah dibahas mengenai Thermometer Digital yang mendeteksi suhu melalui sensor panas LM35 dengan tampilan M1632 LCD maka pada artikel ini adalah merupakan pengembangan dari artikel thermometer digital, di mana system tidak hanya mendeteksi suhu saja melainkan juga menjaga agar suhu bertahan pada nilai tertentu yang diberikan melalui Keypad KP-43865 dengan menggunakan teknik PWM (Pulse Width Modulation). Teknik ini diberikan dengan mengatur lebar pulsa yang diberikan pada rangkaian pemanas dalam periode tertentu.
Gambar 1
Blok Diagram Sistem Pengendali Suhu
Untuk mempertahankan suhu pada suatu nilai tertentu digunakan bagian pemanas (heater). Pemanas ini dibentuk dengan menggunakan kawat nikelin atau kawat dari elemen pemanas setrika yang ditrigger oleh rangkaian transistor seperti pada gambar 2. Transistor 2N3055 yang mempunyai arus maksimum hingga 5A. Dengan arus sebesar 5A dan tegangan kerja 12 Volt, kawat pemanas yang terhubung adalah kawat dengan tahanan minimal 12/5 atau 2,4 ohm.
Transistor 2N3055 mempunyai HFE atau factor penguatan sebesar 20 kali, sehingga arus yang mengalir pada basis transistor ini adalah sebesar:
= 0,25A
AT8951 yang mempunyai arus maksimum sekitar 10mA pada I/Onya tentu saja tidak mampu untuk mengendalikan transistor ini secara langsung, oleh karena itu transistor C9014 dalam hal ini diperlukan untuk memperkuat arus keluaran AT8951.
= 0,00625 atau 6,25 mA
Arus basis transistor 2N3055 adalah merupakan arus kolektor dari transistor C9014 oleh karena itu, pada formula di atas maka ditemukan arus basis yang diperlukan untuk mengendalikan transistor C9014 adalah sebesar 6,25 mA yang dapat dihasilkan oleh keluaran AT8951
Gambar 2
Rangkaian pengendali panas
Gambar 3
Antar muka M1632 LCD dengan Modul DST-52
Tampilan dalam sistem ini menggunakan M1632 LCD dengan teknik antar muka 4 bit seperti yang telah dijelaskan pada edisi sebelumnya dan tampak pada gambar 3. Sedangkan pengambilan data suhu dilakukan dengan menggunakan antar muka ADC (gambar 4) dengan proses yang telah dijelaskan pada edisi yang membahas Thermometer Digital.
Gambar 4
Antar Muka Modul AD-0809
Gambar 5
Antar Muka KP-43865
Keypad 4×3 dalam hal ini merupakan media input ke sistem yang dibahas pada artikel ini berfungsi untuk memberikan nilai setpoint temperatur. Keypad ini terhubung pada port 1 dari Modul DST-52
Gambar 6
Diagram Alir Program Utama
Proses jalannya program diawali dengan inisialisasi LCD dan dilanjutkan dengan pengaturan set point. Setpoint diatur dengan memberikan nilai suhu yang diinginkan melalui keypad. Pada bagian ini, nilai tersebut selain dikirim ke mikrokontroler dan tersimpan pada variable setpoint juga dikirim ke M1632 LCD sehingga tampak pada layar LCD.
Setelah nilai setpoint terisi, program akan mengaktifkan pemanas dengan memberikan pulsa-pulsa yang mentrigger rangkaian transistor pada pemanas. Pulsa-pulsa tersebut akan memberikan panas berdasarkan lebar dari pulsa PWMTime (gambar 7). Lebar pulsa ini tersimpan pada variable PWMTime dari program yang ada pada Modul DST-52. Semakin lebar pulsa PWMTime maka panas yang dihasilkan oleh kawat pemanaspun akan semakin besar. Tampak sinyal yang ada pada bagian bawah dari gambar 7 mempunyai PWMTime yang lebih lebar daripada bagian atasnya. Hal ini menunjukkan bahwa panas yang dibangkitkan oleh kawat pemanas dengan sinyal yang ada di bagian bawah lebih panas daripada sinyal yang bagian atas.
Gambar 7
Pulsa PWM
Hal ini disebabkan karena rangkaian pengendali panas pada gambar 2 bersifat aktif logika 0, oleh karena itu dengan adanya logika 0 yang semakin lebar dalam satu periode waktu tertentu maka panas yang dihasilkanpun akan semakin tinggi.
Pada mulanya pemanas diaktifkan dengan pulsa PWMTime paling kecil dan kemudian system akan membaca suhu yang terjadi melalui ADC. Data dari ADC yang berupa besaran tegangan dikonversi menjadi suhu dengan system pentabelan (Lihat table konversi pada artikel Thermometer Digital). Besaran suhu yang diperoleh juga ditampilkan ke layar LCD.
Bagian delay berfungsi untuk menunda kerja program beberapa saat untuk menunggu respon perubahan suhu dengan adanya perubahan PWMTime. Lama delay sangat tergantung pada beberapa factor. Di antaranya adalah, bahan dari kawat pemanas dan kecepatan perubahan yang diinginkan.
Pada bagian pengatur suhu sesuai setpoint, nilai suhu yang terbaca oleh ADC akan dibandingkan dengan nilai setpoint, (bagian ini dijelaskan lebih detail pada gambar ![]() apabila nilai suhu belum mencapai setpoint, maka PWMTime akan terus bertambah hingga diperoleh nilai yang sama dengan setpoint. Apabila nilai suhu melebihi setpoint maka PWMTime akan berkurang hingga diperoleh pula nilai yang sama dengan setpoint.
apabila nilai suhu belum mencapai setpoint, maka PWMTime akan terus bertambah hingga diperoleh nilai yang sama dengan setpoint. Apabila nilai suhu melebihi setpoint maka PWMTime akan berkurang hingga diperoleh pula nilai yang sama dengan setpoint.
Pada saat suhu sesuai dengan setpoint dengan toleransi yang disebutkan pada bagian konstantan Toleransi, maka pesan ‘Tercapai’ akan ditampilkan pada baris 1 M1632 LCD.
Program lengkap aplikasi ini dapat anda download di www.delta-electronic.com bagian software dengan nama KontrolSuhu.zip
Gambar 8
Diagram alir Bagian Pengaturan Suhu
gambar 13 : konsep penguat kelas G dengan tegangan supply yang bertingkat
PA kelas H
Konsep penguat kelas H sama dengan penguat kelas G dengan tegangan supply yang dapat berubah sesuai kebutuhan. Hanya saja pada penguat kelas H, tinggi rendahnya tegangan supply di-desain agar lebih linier tidak terbatas hanya ada 2 atau 3 tahap saja. Tegangan supply mengikuti tegangan output dan lebih tinggi hanya beberapa volt. Penguat kelas H ini cukup kompleks, namun akan menjadi sangat efisien.
Penutup
High fidelity dan high efficiency adalah dua hal yang menjadi tujuan pokok pada setiap rancangan rangkaian penguat amplifier. Ada beberapa konsep dan metoda lain dari penguat amplifier yang belum disinggung pada tulisan ini. Biasanya konsep dan metoda tersebut dinamakan menurut urutan abjad latin. Mungkin saja pada satu saat kita akan mengenal penguat kelas Z.
-end-
PULSE WIDHT MODULATION
Konsep Dasar PWM
Salah satu cara yang paling mudah untuk membangkitkan sebuah tegangnan analog dari sebuah nilai digital adalah dengan menggunakan pulse-width modulation (PWM). Dalam PWM gelombang kotak, frekuensi tinggi dibangkitkan sebagai output digital. Untuk contoh, sebuah port bit secara kontinyu melakukan kegiatan saklar on dan off pada frekuensi yang relatif tinggi. Selanjutnya, bila sinyal diumpankan pada LPF low pass filter, tegangan pada output filter akan sama dengan Root Mean Squere ( RMS ) dari sinyal gelombang kotak. Selanjutnya tegangan RMS dapat divariasi dengan mengubah duty cycle dari sinyal.
DUTY CYCLE menyatakan fraksi waktu sinyal pada keadaan logika high dalam satu siklus. Satu siklus diawali oleh transisi low to high dari sinyal dan berakhir pada transisi berikutnya. Selama satu siklus, jika waktu sinyal pada keadaan high sama dengan low maka dikatakan sinyal mempunyai DUTY CYCLE 50 %. DUTY CYCLE 20 % menyatakan sinyal berada pada logika 1 selama 1/5 dari waktu total
PWM dengan Mikrokontroler
Pada rangkaian tersebut menunjukkan sebuah DAC yang dibangun dengan metode PWM, yang digunakan untuk mengendalikan kecepatan motor DC dengan modulasi lebar pulsa. Bit 0 dari P0 mengemudikan sebut saklar transistor sebagaimana yang ditunjukkan pada gambar. Motor dihidupkan dan dimatikan untuk suatu periode tertentu
Bagian pada saat motor hidup disebut DUTY CYCLE. Pada program ini menggunakan sebuah byte untuk menyimpan lama waktu motor on, dari sejumlah 256 siklus. Bila duty cycle yang diberikan adalah 10 % maka program ini menyimpan data waktu ON selama 10 siklus dan OFF selama 246 siklus dari 256 siklus.
Berikutnya nilai duty cycle disimpan pada RAM internal yang diberi label dCycle. Komplemen dari duty cycle disimpan pada RAM internal dengan nama dCycleC. Pada perancangan software ini, Timer 0 diaplikasikan dalam mode 2, yaitu 8 bit timer auto reload, yang akan melakukan increment nilai register counter setiap siklus, dan bila terjadi overflow maka data yang berada pada TH0 akan diloadkan ke TL0 yang berfungsi sebagai counter 8 bit.
Bila frekuensi kristal yang digunakan adalah 12 Mhz, sehingga jika nilai reload adalah 0 maka timer 0 akan over flow setiap 256 udetik; dan jika nilai reload adalah FFh maka timer akan over flow setiap 1 udetik. Pertama kali program menghidupkan motor dan menempatkan nilai dCycle ke TH0 sebagai nilai reload. Setelah timer overflow, komplemen dari duty cycle dCycleC akan ditempatkan ke TH0 sebagai nilai reload dan motor berhenti berputar. Pada pemrograman ini keadaan motor dapat dilihat pada register yang dapat dialamati bit, yang ditandai sebagai motorFlag.
Pulse Width Modulation (PWM) adalah sebuah cara memanipulasi lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam suatu perioda, yang akan digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan rata-rata yang berbeda. Penggunaan PWM sangat banyak, mulai dari pemodulasian data untuk telekomunikasi, pengontrolan daya atau tegangan yang masuk ke beban, regulator tegangan, audio effect dan penguatan, serta aplikasi-aplikasi lainnya.
Terlihat pada gambar, bahwa sinyal PWM adalah sinyal digital yang amplitudonya tetap, namun lebar pulsa yang aktif (duty cycle) per periodenya dapat diubah-ubah. Dimana periodenya adalah waktu pulsa high (1) Ton ditambah waktu pulsa low (0) Toff.
Duty cycle adalah lamanya pulsa high (1) Ton dalam satu perioda. Jika f(t) adalah sinyal PWM, maka besarnya duty cyclenya adalah :
Pada grafik PWM teratas terlihat bahwa sinyal high per periodenya, sangat kecil (hanya 10%). Pada grafik PWM ditengah terlihat sinyal highnya hampir sama dengan sinyal low (50%). Dan pada gambar paling bawah terlihat bahwa sinyal high-nya lebih besar dari sinyal low-nya (90%).
Maka jika dimisalkan tegangan input yang melalui rangkaian tersebut sebesar 10 V. Maka jika digunakan PWM teratas, nilai tegangan output rata-ratanya sebesar 1 V (10% dari Vsource), jika digunakan PWM yang tengah, maka tegangan output rata-ratanya sebesar 5V (50%). Begitu pula jika menggunakan PWM yang paling bawah, maka tegangan output rata-ratanya sebesar 9V (90%).
Bagaimana cara mendapatkan sinyal PWM?
Untuk mendapatkan sinyal PWM dari input berupa sinyal analog, dapat dilakukan dengan membentuk gelombang gigi gergaji atau sinyal segitiga yang diteruskan ke komparator bersama sinyal aslinya. (Namun berbahagialah bagi para pengguna mikrokontroler, sebab pada beberapa tipe mikrokontroler telah tersedia fasilitas pembangkit PWM. Jadi tidak perlu bingung-bingung lagi)
Dimana sinyal input analog (berwarna hijau) dimodulasikan dengan sinyal gigi gergaji (berwarna biru), sehingga didapatkan sinyal PWM seperti gambar dibawahnya (berwarna merah)
Ya… segini dulu aja teorinya. Saya rasa topik ini bisa dikembangkan, terutama bagi para penggemar mikrokontroler dan robotika. Untuk mengatur kecepatan putar motor DC, membuat dimmer LED, atau pengontrolan lainnya. Intinya, bagaimana caranya mengontrol daya yang diberikan ke beban, dengan menggunakan sumber yang konstan? Jawabannya adalah PWM!
Silahkan.. yang mau menambahkan! Dengan sangat senang hati.
Pulse Width Modulation
September 21, 2007 oleh roenz
Salah satu cara untuk mengirimkan informasi analog adalah dengan menggunakan pulsa-pulsa tegangan atau pulsa-pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa-pulsa persegi yang berulang-ulang. Salah satu teknik modulasi pulsa yang digunakan adalah teknik modulasi durasi atau lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut. Metode tersebut dikenal dengan nama Pulse Width Modulation (PWM). Metode PWM dikenal juga dengan nama Pulse Duration Modulation (PDM) atau Pulse Length Modulation (PLM)
Untuk membangkitkan sinyal PWM, digunakan komparator untuk membandingkan dua buah masukan yaitu generator sinyal dan sinyal referensi. Hasil keluaran dari komparator adalah sinyal PWM yang berupa pulsa-pulsa persegi yang berulang-ulang. Durasi atau lebar pulsa dapat dimodulasi dengan cara mengubah sinyal referensi.
Metode PWM digunakan untuk mengatur kecepatan motor, informasi yang dibawa oleh pulsa-pulsa persegi merupakan tegangan rata-rata. Besarnya tegangan rata-rata tersebut dapat diperoleh dari :
Vout = (Vref * duty cycle) / periode
Semakin lebar durasi waktu tunda positif pulsa dari sinyal PWM yang dihasilkan, maka perputaran motor akan semakin cepat, demikian juga sebaliknya.
Tuesday, May 6 2008
Uncategorized 12:04 pm
SENSOR
Sensor adalah peralatan yang digunakan untuk merubah suatu besaran fisik menjadi besaran listrik sehingga dapat dianalisa dengan rangkaian listrik tertentu. Hampir seluruh peralatan elektronik yang ada mempunyai sensor didalamnya.
Pada saat ini, sensor tersebut telah dibuat dengan ukuran sangat kecil dengan orde nanometer. Ukuran yang sangat kecil ini sangat memudahkan pemakaian dan menghemat energi.
1. JENIS SENSOR
Sensor fisika
Sensor fisika mendeteksi besaran suatu besaran berdasarkan hukum-hukum fisika. Contoh sensos fisika adalah sensor cahaya, sensor suara, sensor kimia, , sensor gaya, sensor kecepatan, dan sensor percepatan, dan sensor suhu.
Sensor cahaya adalah alat yang digunakan untuk merubah besaran cahaya menjadi besaran listrik. Prinsip kerja dari alat ini adalah mengubah energi dari foton menjadi elektron. Idealnya satu foton dapat membangkitkan satu elektron. Sensor cahaya sangat luas penggunaannya, salah satu yang paling populer adalah kamera digital. Pada saat ini sudah ada alat yang digunakan untuk mengukur cahaya yang mempunyai 1 buah foton saja.
Di bawah ini adalah jenis-jenis sensor cahaya, di antaranya:
- Detektor kimiawi, seperti pelat fotografis, dimana mmolekul silver halida dibagi menjadi sebuah atom perak metalik dan atom halogen. Pengembang fotografis menyebabkan terbaginya molekul yang berdekatkan secara sama.
- Fotoresistor atau Light Dependent Resistor (LDR) yang berubah resistansinya ketika dikenai cahaya
- Sel fotovoltaik atau sel matahari yang menghasilkan tegangan dan memberikan arus listrik ketika dikenai cahaya
- Fotodioda yang dapat beroperasi pada mode fotovoltaik maupun fotokonduktif
- Tabung fotomultiplier yang mengandung fotokatoda yang memancarkan elektron ketika dikenai cahaya, kemudian elektron-elektron tersebut akan dikuatkan dengan rantai dynode.
- Tabung cahaya yang mengandung fotokatoda yang memancarkan elektron ketika dikenai cahaya, dan umumnya bersifat sebagai fotoresistor.
- Fototransistor menggabungkan salahsatu dari metode penyensoran di atas
- Detektor optis yang berlaku seperti termometer, secara murni tanggap terhadap pengaruh panas dari radiasi yang masuk, seperti detektor piroelektrik, sel Golay, termokopel dan termistor, tapi kedua yang terakhir kurang sensitif.
- Detektor cryogenic cuku tanggap untuk mengukur energi dari sinar-x tunggal, serta foton cahaya terlihat dan dekat dengan inframerah (Enss 2005).
 contoh penggunaan Sensor cahaya dengan LDR
contoh penggunaan Sensor cahaya dengan LDR
2. Cara Kerja Sensor Tsunami
Tsunami banyak terjadi daerah yang dekat ke pantai, yang diakibatkan oleh bergesernya lempeng bumi. Gejala terjadinya Tsunami dapat dilihat dari terjadinya arus pasang yang mengakibatkan naiknya tinggi permukaan laut. Untuk itu, di laut yang dekat dengan pantai biasanya ditempatkan sensor yang akan mendeteksi terjadinya kenaikan tinggi permukaan laut.
Secara teknis, cara kerja sensor tersebut adalah sebagai berikut:

1. Gejala awal tsunami adalah air surut melebihi batas maksimum secara mendadak baru kemudian terjadi gelombang pasang. Pada sistem ini, jika pasang surutnya air masih dalam batas garis kendali ( lihat Gambar ), maka sensor belum akan bekerja.
2. Kita harus menentukan batas maksimum air pasang maupun batas maksimum ketika surut ( dengan penelitian ).
3. Ketika terjadi tsunami, air surut melewati sensor 1. Ketika sensor 1 terlewati air, maka lampu kuning akan menyala disertai dengan alarm 1. Hal ini menandakan bahwa kemungkinan besar akan terjadi tsunami.
4. Ketika gelombang pasang terjadi, dan menyentuh sensor 2, maka lampu merah akan menyala disertai alarm 2. Hal ini menandakan telah terjadi tsunami.
5. Saat bencana tsunami terjadi, lampu kuning, lampu merah, alarm 1, dan alarm 2 akan terus menyala hingga tombol ON/OF pada stasiun pengamatan ditekan.

5.1. Prinsip Kerja Wahana Gerak Mandiri Penghindar Rintangan
Fungsi dari sistem navigasi dengan menggunakan sensor ultrasonik ini adalah bagaimana membuat kendaraan mini yang bergerak bebas pada suatu area yang dibatasi oleh sekat/dinding pemisah tanpa menyentuh sekat/dinding tersebut.

Gbr.5.1. Wahana Gerak Mandiri Penghindar Rintangan.
Seperti terlihat pada gambar di atas, terdapat 2 buah motor stepper penggerak roda utama (MT1 dan MT2) yang berfungsi untuk mengatur kecepatan dari maju-mundur sekaligus mengontrol arah dan besar dari sudut belokan dari robot mobil tersebut. Juga terdapat 3 buah sensor ultrasonik sebagai sensor jarak yang terletak di bagian depan robot mobil. Peletakan dari 3 buah sensor ultrasonik secara bersilangan dimaksudkan agar :
1. Dapat mendeteksi besarnya halangan yang berada di depannya sehingga dapat menghindari halangan tersebut dengan baik.
2. Masih mampu mendeteksi adanya belokan walaupun robot mobil sudah terlalu berdekatan dengan salah satu sisi dari jalur jalan.
3. Pendeteksian terhadap adanya belokan dari jarak yang masih jauh lebih baik karena mempunyai sudut pantulan yang lebih kecil jika dibandingkan dengan jika dipasang secara tidak bersilangan.
Sistem navigasi untuk kendaraan mini ini digambarkan pada bagan dibawah ini.

Gbr.5.2. Sistem navigasi untuk wahan gerak mandiri.
Secara garis besar prinsip kerja dari navigasi robot mobil dapat dilihat pada gambar dibawah ini.
 |
Gbr.5.3. Prinsip kerja navigasi wahana gerak mandiri (Autonomous Mobile-vehicle).
5.2. Rancangan Mekanik
Gambar 5.4 di bawah ini menunjukkan masing-masing tampak atas dan tampak samping dari sistem wahana gerak mandiri. Nampak rangkaian elektronika berupa rangkaian sensor dan kontroler terpasang pada punggung wahana. Sistem mekatronika tersebut digerakkan oleh 2 buah motor stepper yang masing-masing memutar roda kiri dan roda kanan.

TAMPAK SAMPING

Gbr.5.4. Prototipe rancangan mekanik badan wahana gerak mandiri.
5.3. Rancangan Rangkaian Elektronika dan Kontroler
5.3.1. Rangkaian Sensor
Gelombang ultrasonik adalah gelombang dengan besar frekuensi diatas frekuensi gelombang suara yaitu lebih dari 20 KHz. Seperti telah disebutkan bahwa sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang disebut transmitter dan rangkaian penerima ultrasonik yang disebut receiver. Sinyal ultrasonik yang dibangkitkan akan dipancarkan dari transmitter ultrasonik. Ketika sinyal mengenai benda penghalang, maka sinyal ini dipantulkan, dan diterima oleh receiver ultrasonik. Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian mikrokontroler untuk selanjutnya memberikan perintah kepada robot agar bergerak menjauhi penghalang tersebut sesuai dengan algoritma program mikrokontroler yang dibuat, seperti terlihat pada gambar di bawah ini.

Gbr.5.5. Prinsip kerja sensor ultrasonik

Gbr.5.6. Rangkaian Pemancar Ultrasonik
a. Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitter ultrasonik dan sinyalnya difokuskan melalui sebuah corong/pipa. Pada penggunaannya, akan digunakan 3 buah pemancar yang masing-masing mengirimkan sinyal dengan frekuensi yang berbeda-beda.
b. Penerima Ultrasonik (Receiver)
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan. Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensi ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high (logika ‘1’) sedangkan jarak yang lebih jauh adalah low (logika’0’). Logika-logika biner ini kemudian diteruskan ke rangkaian pengendali (mikrokontroler).

Gbr. 5.7. Rangkaian Penerima ultrasonik.
Cara Kerja Rangkaian Sensor Getar
Kedatangan orang yang tidak diundang memang tidak disangka dan kemampuannya semakin canggih pula. Namun kehadiran tamu tak diundang ini tidak bisa tanpa menyebabkan getaran paling tidak cukup untuk digunakan sebagai trigger sensor getaran ini.
Rangkaian sensor getaran ini dibuat sangat sederhana dan dimungkinkan untuk digunakannya baterai sebagai sumber tenaga listriknya. Selain rancangannya yang sangat sederhana, rangkaian ini juga sangat kecil menggunakan arus listrik.
Cara Kerja Rangkaian
Sensor untuk rancangan rangkaian ini diambil dari komponen yang mudah didapatkan. Sensornya hanya berupa sebuah speaker dengan diameter 2 inch. Prinsip kerjanya sangat sederhana yaitu membalik proses kerja daari proses kerja speaker biasa.

Gambar 1
Ide Penggunaan Speaker sebagai Sensor Getaran
Speaker jika terminal-terminalnya mendapatkan sinyal seperti pada gambar 1 sebelah kiri maka akan menghasilkan output berupa getaran pada membran dan menyebabkan terbentuknya bunyi.
Sebaliknya pada saat speaker ini digunakan sebagai sensor, lapisan membran pada speaker berfungsi sebagai detektor getaran. Ketika ada getaran datang pada membran, maka membran ini juga akan ikut bergetar (beresonansi). Bergetarnya membran akan mengakibatkan lilitan membran akan bergerak relatif terhadap inti magnet tetap dan menghasilkan sinyal listrik.
Pembatasan daerah resonansi pada membran perlu diatur agar membran tidak akan merespon getaran dengan frekunsi yang tidak dinginkan. Di dalam proyek ini, membran dibuat sedemikian hingga hanya merespon pada frekuensi rendah karena getaran langkah/benda pada frekuensi rendah. Untuk menurunkan respon pada speaker digunakan penambahan material yang bersifat menyerap sinyal/getaran frekuensi tinggi seperti pemberian lapisan spon pada daerah di sekitar membrannya. Penambahan ini harus dilakukan dengan hati-hati agar speaker tetap dapat merespon getaran dengan baik.
Untuk memperkuat sinyal yang dihasilkan dari speaker ini digunakan opamp CA3094. Dasar pemilihan transistor ini adalah karena yang sinyal yang dihasilkan oleh speaker amplitudonya dan arusnya sangat lemah. Untuk mengatasi hal tersebut dengan hanya menggunakan sebuah opamp maka harus digunakan opamp yang mempunyai karakteristik transconductance amplifier. Kelebihan dari IC opamp ini adalah gain nya bisa dikontrol sehingga CA3904 ini biasanya dikatakan sebagai programmable transconductance amplifier. Pada output CA3094 diumpankan pada sebuah rangkaian monostabil yang mengatur lama bunyi dari buzzer.
Ketika terdapat getaran pada membran maka speaker akan menghasilkan sinyal dengan amplitudo yang sangat kecil. Sinyal ini dikuatkan sehingga menyebabkan tegangan di pin 1 pada logika ‘1’. Kondisi ini menyebabkan adanya feedback melalui transistor 2N4403 dan dioda 1N914. Karena transistor 2N4403 ‘ON’ dan menghasilkan feedback maka tegangan pada basis 2N4401 naik dan menyebabkan transistor ini ‘ON’ pula kemudian juga mengaktifkan rangkaian monostable.
Dengan ‘ON’-nya transistor 2N4401 maka terdapat arus yang mengalir melalui buzzer kemudian transistor 2N4401. Kondisi ini akan mengakibatkan buzzer berbunyi sampai rangkaian monostabil kembali dalam kondisi reset.

!– google_ad_client = “pub-1394550330977122″; google_ad_width = 234; google_ad_height = 60; google_ad_format = “234×60_as”; google_ad_type = “text_image”; //2007-05-31: elektronika google_ad_channel = “7593794115″; google_color_border = “FFFFFF”; google_color_bg = “ffffff”; google_color_link = “999999″; google_color_text = “999999″; google_color_url = “2ba94f”; //–>
Gambar 2
Rangkaian Lengkap Detektor Getaran
Penempatan posisi sensor dan cara penempatannya berpengaruh pada kepekaan dari rangkaian ini. Untuk memperluas daerah kerja maka mikrophone dapat diletakkan di atas sebuah pipa PVC yang telah diisi material tertentu dan kemudian pipa PVC ini ditanam di dalam tanah. Semakin panjang pipa PVC yang ditanam maka semakin baik pula kerja dari sensor ini. Panjang pipa PVC yang digunakan sekitar 1 meter. Dengan adanya pipa PVC ini maka getaran yang ditimbulkan akan bergerak/merambat melalui material di dalam pipa PVC dan akhirnya sampai dipermukaan pada sensor proyek ini.
Tuesday, Apr 22 2008
Uncategorized 11:17 am

| |||||

Tuesday, Apr 22 2008
Uncategorized 10:28 am
A. Rangkaian H-Bridge
Karakteristik transistor yang digunakan BD 140
Ic maks 405 mA – 2 A
hfe 25 – 50

Rangkaian H-Bridge

Rangkaian H-Bridge untuk satu arah putaran
Vsaturasi pada transistor = 0.2 Volt, Vmotor = 3 Volt, Vcc = 5 Volt dan Imotor = 200 mA (tanpa beban), maka diperoleh harga Rk.
Ic = (hfe x Ib)+ Iceo (Iceo dapat diabaikan), maka diperoleh harga Ib, R1 dan R2.
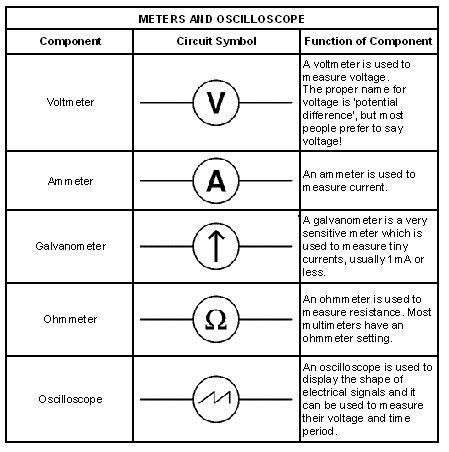
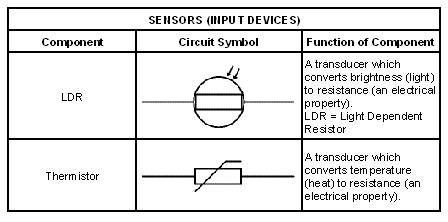
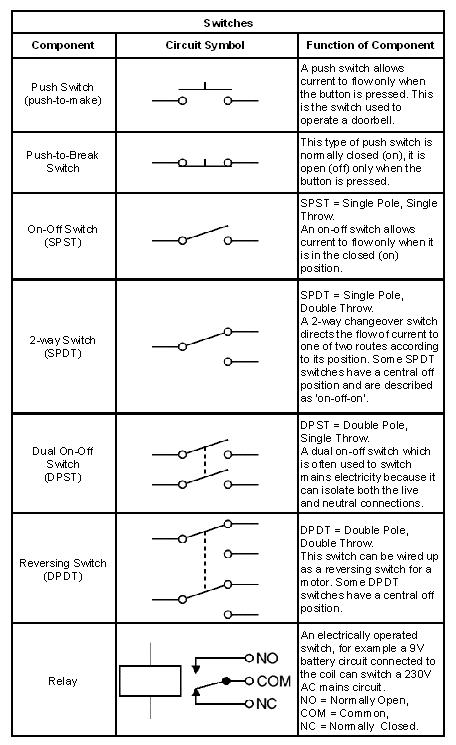
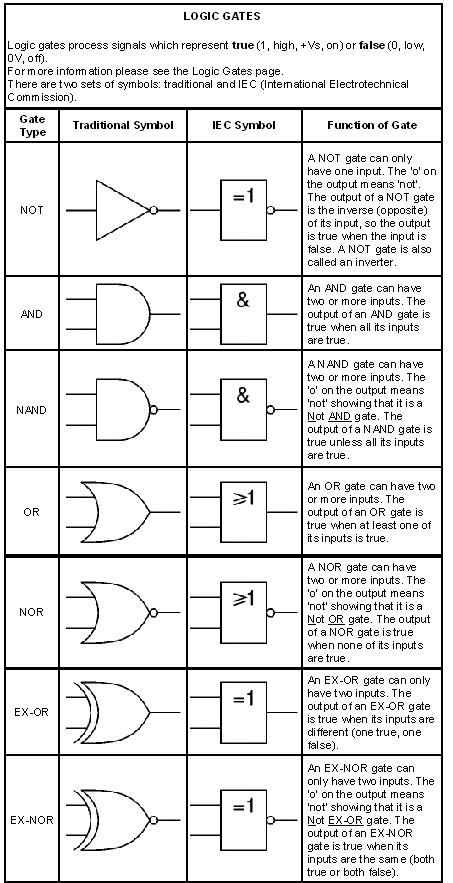
Simbol-simbol dalam elektronika Tuesday, Apr 8 2008
Uncategorized 10:53 am





Tidak ada komentar:
Posting Komentar